|
|
|
解决方案
镜头设计师已经知道两种常见的光瞳定义:一种是简单结构或者光阑位于系统的最前方。对于更复杂的系统,“光线瞄准”,用于模拟光阑在系统内部的情况。
镜头通常在系统内部有一个“光阑”,如下例所示(可在X32.RLE中找到)。 (对于这张图片,我们修改了镜头以显示正确的光瞳类型。你看到的是第二种光瞳类型。)
各个视场的光线充满了表面7的孔径,这被称为光阑。 当你告诉程序追迹光线时,它首先必须知道瞄准光线的位置,以便知道到达光阑上的位置。 例如,HBAR = 1且YEN = 1的光线(全视场边缘光线)应该在表面7的边缘处。 它是如何知道瞄准目标的? 这是光瞳定义的问题。
最常用的两个定义是近轴和真实光瞳。 首先,让我们看一下使用简单的近轴光瞳得到的结果:
可以使用输入在镜头文件中声明该光瞳定义
RLE
…
APS 7
…
END
但是你会注意到这个定义有两个问题:主光线不会穿过表面7的中心,而边缘光线不会填满那个表面的孔径。 让我们依次解决这些问题。 首先,我们声明表面7是一个真正的光阑,用
CHG APS
-7
END
减号表示这是一个真正的光阑,必须通过迭代找到主光线。 这激活了仅针对主光线的光线。
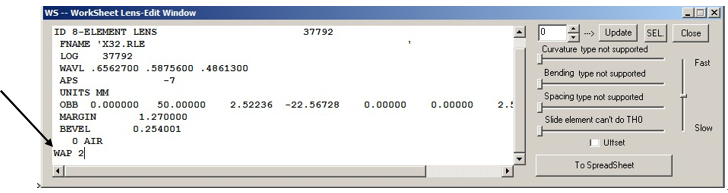
现在主光线还可以,但边缘光线不行。 我们需要另一个命令,它将调整光瞳的大小,以便很好地充满光阑。 这是WAP 2选项(有三种广角 – 光瞳(WAP),您可以在用户手册中阅读。 它通过在光阑的边缘迭代一些光线来找到入瞳的形状。 但是这个选项需要在光阑表面上设置一个硬性通光口径,以便于光线瞄准。 我们假设当前没有定义孔径。 您可以执行CAP列表 - 查看所有当前孔径的值 - 然后为表面7指定一个“通光口径”。该值结果为3.9937,因此我们可以在CHG文件中输入该值或使用工作表。 以下是使用CHG文件的方法:
CHG
7 CAO 3.9937
END
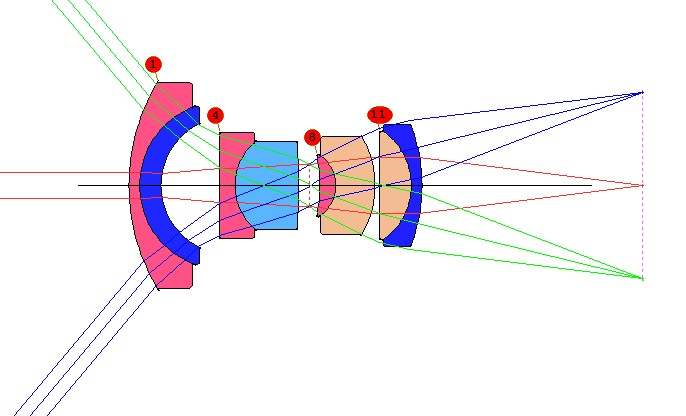
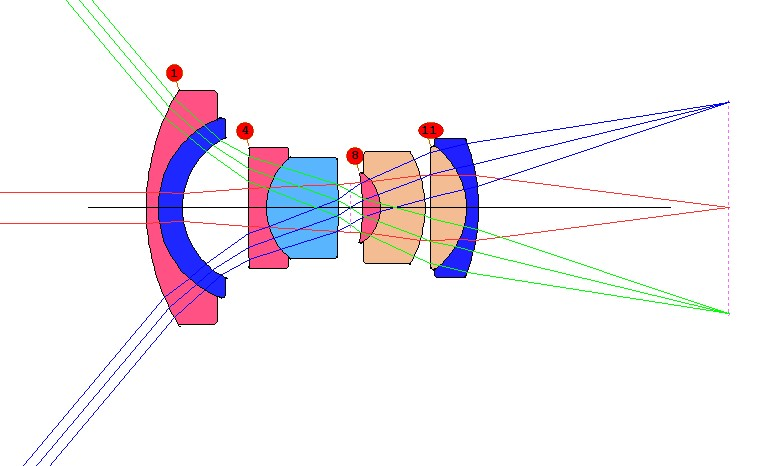
更简单的方法是在CHG文件或WorkSheet编辑窗格中键入7 CFIX。 这可以修复当前值,所以您不需要自己键入它。 现在再次使用工作表更改为WAP 2 ...
然后单击“更新”按钮。你得到的镜头如上图第一张图所示。现在,主光线和边缘光线都到达了表面7上的正确位置。在这里,我们开启了光线,总共瞄准了五条光线。
到到目前为止,这并不复杂。假设您正在优化镜头并且表面7上所需的孔径不断变化。在这种情况下,我们固定的孔径值将会出现问题。
没问题。我们指定一个选项,每次更换镜头时重新计算该孔径。这是通过将指令CSTOP添加到镜头输入文件来完成的。现在程序将改变7上的CAO,因此它总是等于那里的近轴边缘光线高度。
如果镜头的光瞳像差太大,以至于真正的轴向边缘光线需要与近轴光线有不同的孔径,请将其更改为CSTOP REAL。您甚至可以指定用于定义此孔径的真实光线,如UM中所述。
但是所有这些选择的意义何在? 是不是只是为了更容易的对付那种“光线瞄准”?其它程序是不是也可以?
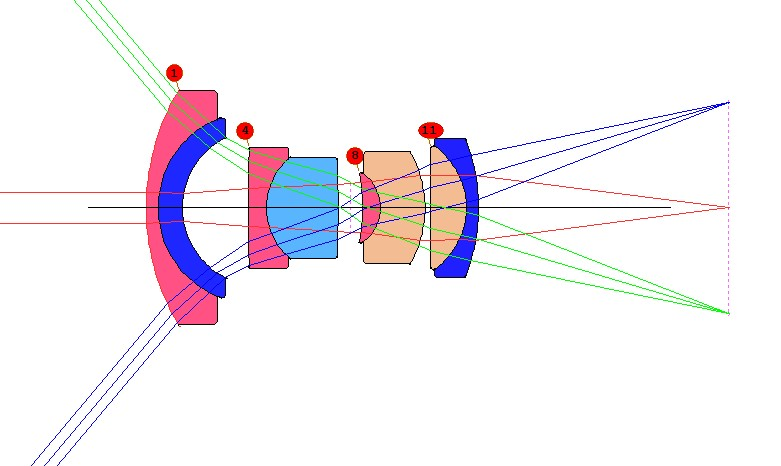
是的,它更容易 - 但速度要慢得多。 通常实现时,当这些程序追迹任何类型的像质分析的光线网格时,它们在光阑处创建一个方形网格,然后迭代每条光线,使其通过该网格点。 所有迭代都需大量时间。 下图是一个超广角镜头设计的例子。
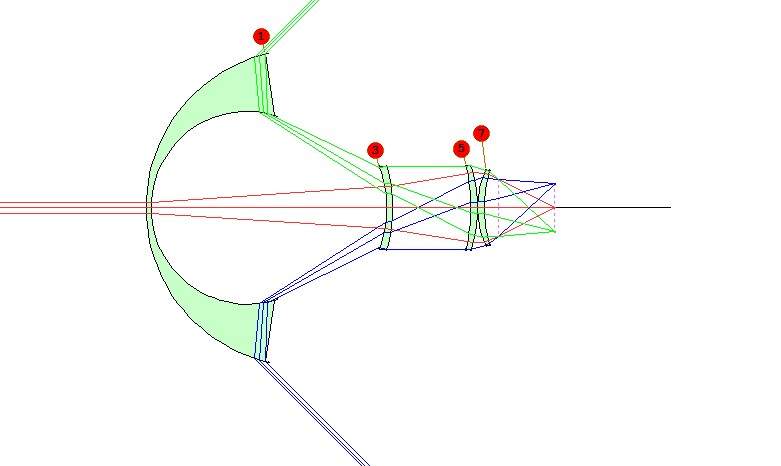
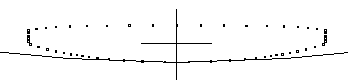
光阑位于表面9上,并且由WAP 2选项很好地填充。 让我们看一下表面上的足迹,它显示来自全视场的光线:
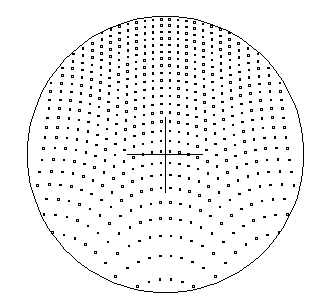
这肯定不是一个均匀的方格! 采用“光线瞄准”的那些程序以错误的方式分布填充该孔径,根据该点处的实际光线密度改变每条光线的有效光焦度。 虽然这确实可以产生对像质的正确评估,但人们不得不问为什么在所有光线迭代中花费了这么多时间。
相反,SYNOPSYS找到入瞳的大小和形状,然后用均匀的网格填充它。 对于上述镜头,表面1上的光瞳如下。
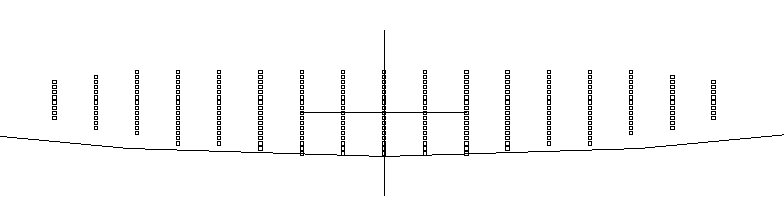
SYNOPSYS中的光瞳选项模拟了此分布的轮廓,因此常规网格可以按原样填充它。 没有必要迭代每条光线,因此它更快,并且在光阑处的分布被正确建模。 对于这个极端的例子,一个简单的轮廓并不是很好(但通常它是由椭圆形建模)。 在这种情况下,通过在镜头文件中声明RPUPIL可以找到更好的光瞳。 现在它以一个包围该椭圆的矩形开始,并删除分布在孔径外的任何光线。 这是进入镜头时的形状:
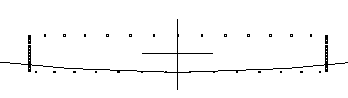
以下是通过的光线:
我们更喜欢使用这种方法,而不是其他代码中使用的计算比较慢“光线瞄准”。
不要忘记查看对话框MPW(菜单,光瞳向导)和MOW(菜单,物面向导),您可以通过复选框和从各种选项中选择来定义所需的光瞳类型。 这两个对话框都做了很多相同的事情,但它们的原理方式不同; 您可以根据您的喜好选择。
SYNOPSYS中独特的光瞳定义提供了一个有趣的可能性 - 这很方便,但需要一些习惯。让我们说明一下。 首先,我们将向您展示一些不符合您期望的光线,然后我们将描述一种简单的方法来保持正确的光线。 取出命名为1.RLE的镜头。
FETCH 1
在PAD中查看
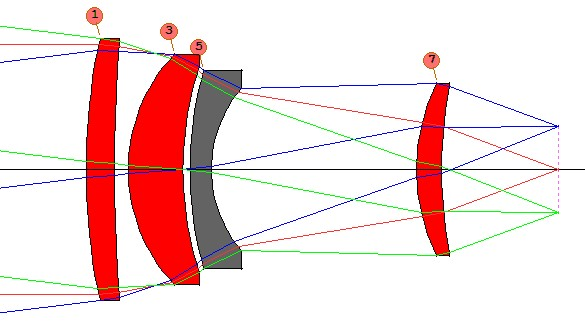
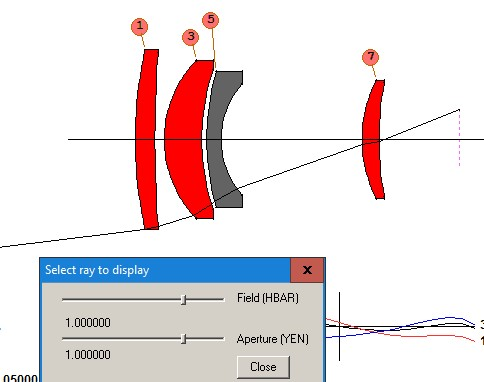
此时镜头已在表面4上指定了一个近轴孔径。在PAD中,单击PAD顶部按钮 ,然后选择绘制单根光线的选项。 单击“确定”,将打开一个小框,您可以使用两个滑块选择要绘制的光线。 将顶部滑块移至全视场(HBAR = 1),将底部移至全孔径(YEN = 1)。 此对象已定义为正角度,这意味着“全视场”光线从轴下方的对象开始。
,然后选择绘制单根光线的选项。 单击“确定”,将打开一个小框,您可以使用两个滑块选择要绘制的光线。 将顶部滑块移至全视场(HBAR = 1),将底部移至全孔径(YEN = 1)。 此对象已定义为正角度,这意味着“全视场”光线从轴下方的对象开始。
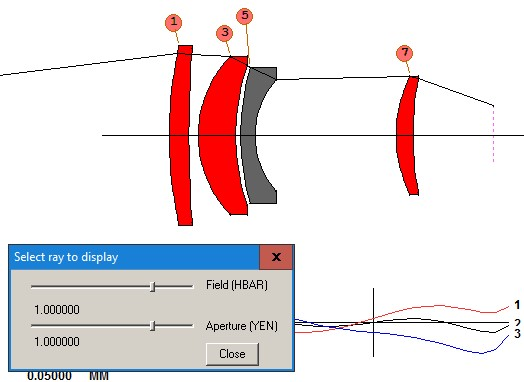
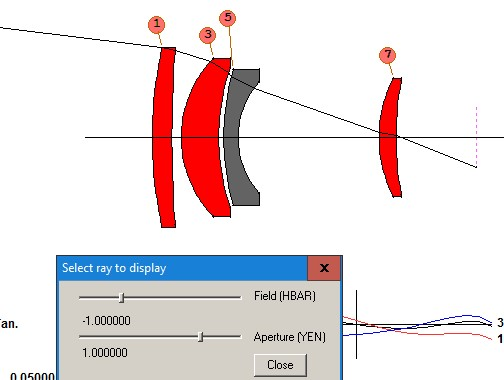
您可以按预期看到全视场边缘光线。 现在将顶部滑块移动到视场的底部(HBAR = -1)。
再来一次,光线进入光瞳的顶部。 这是近轴光瞳的基本情况。
关闭光线显示对话框并将光阑指定更改为
APS -4
在工作表中。 请记住,全视场位于负Y坐标处,远离镜头左侧。
现在再次打开单光线对话框,再次将其设置为全孔径和全视场。
“全孔径”光线现在位于光瞳的底部。 为何如此?
简单,此功能旨在使您可以轻松纠正羽化边缘,无论您在哪个视场寻找。 如上图所示,如果羽化是一个问题,你可以沿着“上部”边缘光线(显示的光线)进行校正。 现在转到较低的视场,HBAR = -1。
要纠正的光线仍然是上边缘光线! 程序根据您要追迹的视场的方向旋转整个入瞳。 如果您在倾斜视场中追迹一个点,“上边缘光线”将变成极端歪斜光线,因此您可以轻松控制羽化边缘。 如果我们让所有视场上边缘光线和下边缘光线的定义相同(就像光瞳一样); 你必须找出要修复的倾斜光线,然后为它创建一个像差。
那么如何才能轻松找出要检查或纠正羽状边缘的光线? 简单。 PAD显示屏打开时,按F7键。 只显示“较低”的边缘光线。 F8键仅显示“上部”。 只需按一下键就可以判断哪条光线在哪里!
这种光瞳定义还有另一个优点:入射光瞳通常被建模为椭圆形,如本课程的第一部分所示,并且事实证明椭圆也随着视场旋转。 因此,它可以模拟场中所有点的渐晕光瞳。
有关旋转光瞳的示例,请参阅用户手册中的第2.6.2节。
程序根据全视场物体高度的符号决定哪条光线称为“上部”光线。 由于在这个例子中光线在是负视场的,它将边缘光线翻转为正HBAR。 在负HBAR处,对象来自正Y坐标,并且光线不会翻转。
在HBAR = 0?为避免混淆既不是正视场也不是负视场,程序会在那里显示一个非常小但非零的视场。
试试F7和F8键。您将了解更多。
ASAP/APEX技术交流群 373021576
SYNOPSYS光学设计与优化交流群 965722997
RP激光软件交流群 302099202
武汉墨光科技有限公司
Copyright © 2012-2021 武汉墨光科技有限公司版权所有
许可证:鄂ICP备17024342号-1
